

آلة عد الأقراص الفوارة
سمات
1. نظام اهتزاز الغطاء
يتم تحميل الغطاء في القادوس يدويًا، ويتم ترتيب الغطاء تلقائيًا على الرف للتوصيل عن طريق الاهتزاز.
2. نظام تغذية الأقراص
3. ضع الجهاز اللوحي في حامل الأجهزة اللوحية يدويًا، وسيتم إرسال الجهاز اللوحي إلى موضع الجهاز اللوحي تلقائيًا.
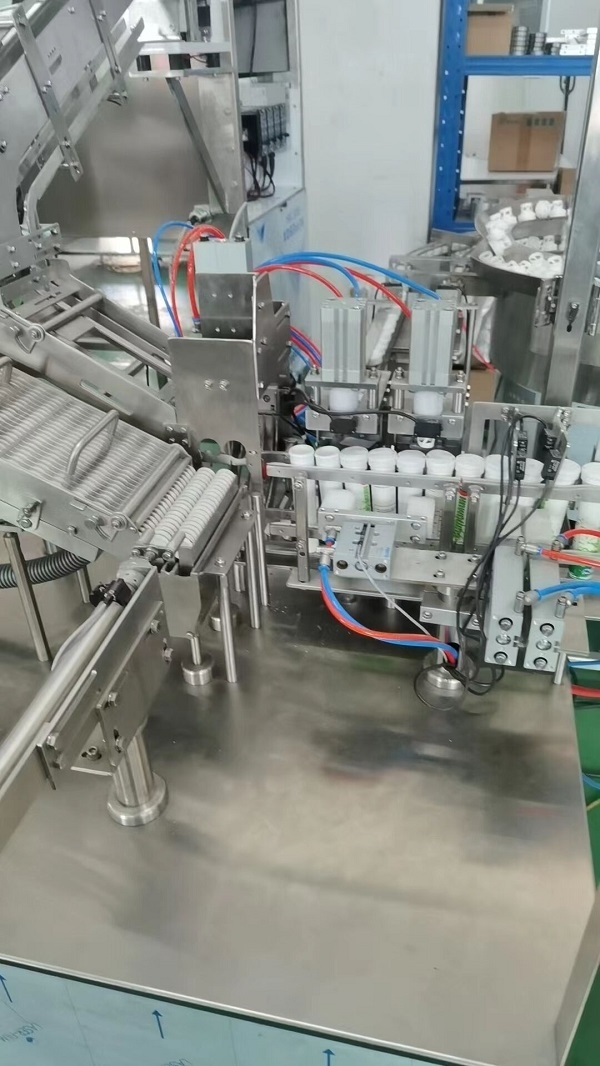
4. تعبئة وحدة الأنابيب
بمجرد اكتشاف وجود أنابيب، ستقوم أسطوانة تغذية الأقراص بدفع الأقراص إلى داخل الأنبوب.
5. وحدة التغذية الأنبوبية
ضع الأنابيب في القادوس يدويًا، وسيتم وضع الأنبوب في موضع تعبئة الأقراص عن طريق فك تشابك الأنبوب وتغذية الأنبوب.
6. وحدة دفع الغطاء
عندما يتم وضع القرص في الأنابيب، سيقوم نظام دفع الغطاء بدفع الغطاء وإغلاقه تلقائيًا.
7. وحدة رفض الأجهزة اللوحية
إذا نقص قرص واحد أو أكثر من الأقراص في الأنبوب، فسيتم رفض الأنبوب تلقائيًا. وفي حال عدم وجود أقراص أو أنابيب، فلن تقوم الآلة بإغلاق الأنبوب.
8. قسم التحكم الإلكتروني
يتم التحكم في هذه الآلة بواسطة وحدة تحكم منطقية قابلة للبرمجة (PLC) وأسطوانة ومحرك متدرج، وهيمزود بنظام إنذار متعدد الوظائف تلقائي.
حدود
| نموذج | TWL-80A |
| سعة | 80 أنبوبًا/دقيقة |
| الجهد االكهربى | عن طريق التخصيص |
| قوة | 2 كيلو واط |
| الهواء المضغوط | 0.6 ميجا باسكال |
| أبعاد الآلة | 3200 × 2000 × 1800 مم |
| وزن الآلة | 1000 كجم |


فيديو


نشرتنا الإخبارية الأسبوعية
من الحقائق الراسخة أن القارئ سيرضى بـ
قابلية قراءة الصفحة عند النظر إليها.
-

بريد إلكتروني
-

هاتف
-

واتساب
-

قمة


